About me
My name is Deheng Zhang, I am currently Doctoral Researcher at the INSAIT supervised by Prof. Luc Van Gool and Dr. Danda Paudel. Previously, I finished my MSc at ETH Zürich where I worked on 3D Vision/Graphics research projects in Disney Research (Studio) Zürich overseen by Prof. Dr. Markus Gross and VLG overseen by Prof. Dr. Siyu Tang. Before that, I finished Bachelor’s degree at CityU of Hong Kong.
My current research interest is an intersection between computer vision and computer graphics, and I would like to explore more possibilities to combine deep learning with traditional rendering or 3D vision algorithms.
My hobbies include Rendering, Photography, Video Game, Finger-style guitar, Table Tennis, Skiing, and Hiking.
News
- 2025.09: 🎉🎉 Our paper StateSpaceDiffuser: Bringing Long Context to Diffusion World Models has been accepted by NeuraIPS 2025!
- 2025.04: I have joined INSAIT as a PhD student, supervised by Prof. Luc Van Gool and Dr. Danda Paudel!
- 2024.10: 🎉🎉 My first first-author paper RISE-SDF: a Relightable Information-Shared Signed Distance Field for Glossy Object Inverse Rendering has been accepted by 3DV 2025!
- 2023.10: 🎉🎉 My first first-author paper CoARF: Controllable 3D Artistic Style Transfer for Radiance Fields has been accepted by 3DV 2024!
Education
- 2024 - Present, Doctoral Researcher, INSAIT, Sofia, Bulgaria.
- 2021 - 2024, Master of Science, Computer Science, ETH Zürich, Switzerland.
- 2017 - 2021, Bachelor of Science with First Class Honours, Computer Science (AI Stream), City University of Hong Kong, Hong Kong SAR.
- 2014-2017, Senior High School Diploma, Shandong Experimental High School, China.
Publications
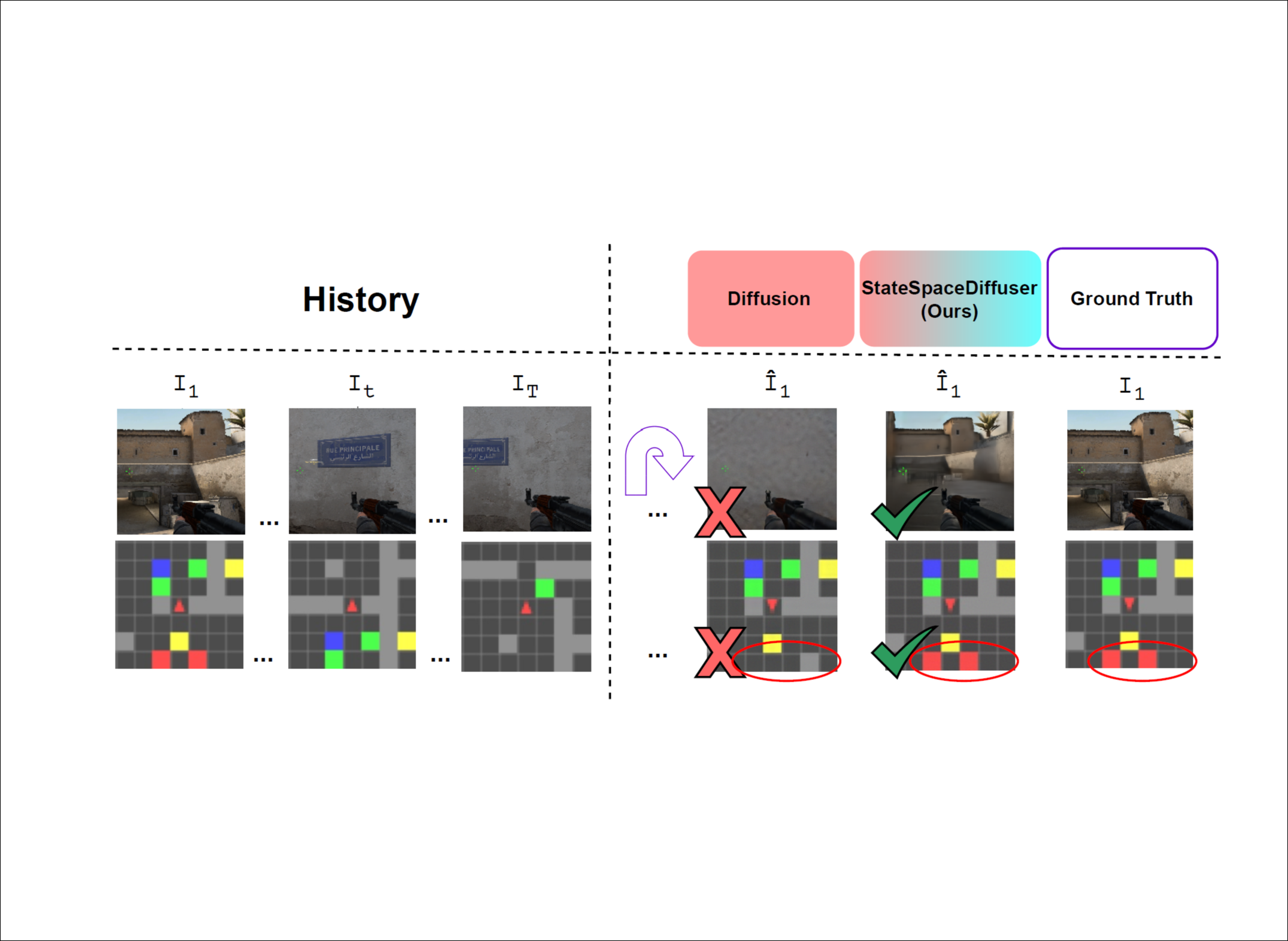 | Nedko Savov, Naser Kazemi, Deheng Zhang, Danda Paudel, Xi Wang, Luc Van Gool NeurIPS 2025 Paper | Project website In this paper, we introduce StateSpaceDiffuser to solve the memory issue of world model, where a diffusion model is enabled to perform long-context tasks by integrating features from a state-space model, representing the entire interaction history. |
 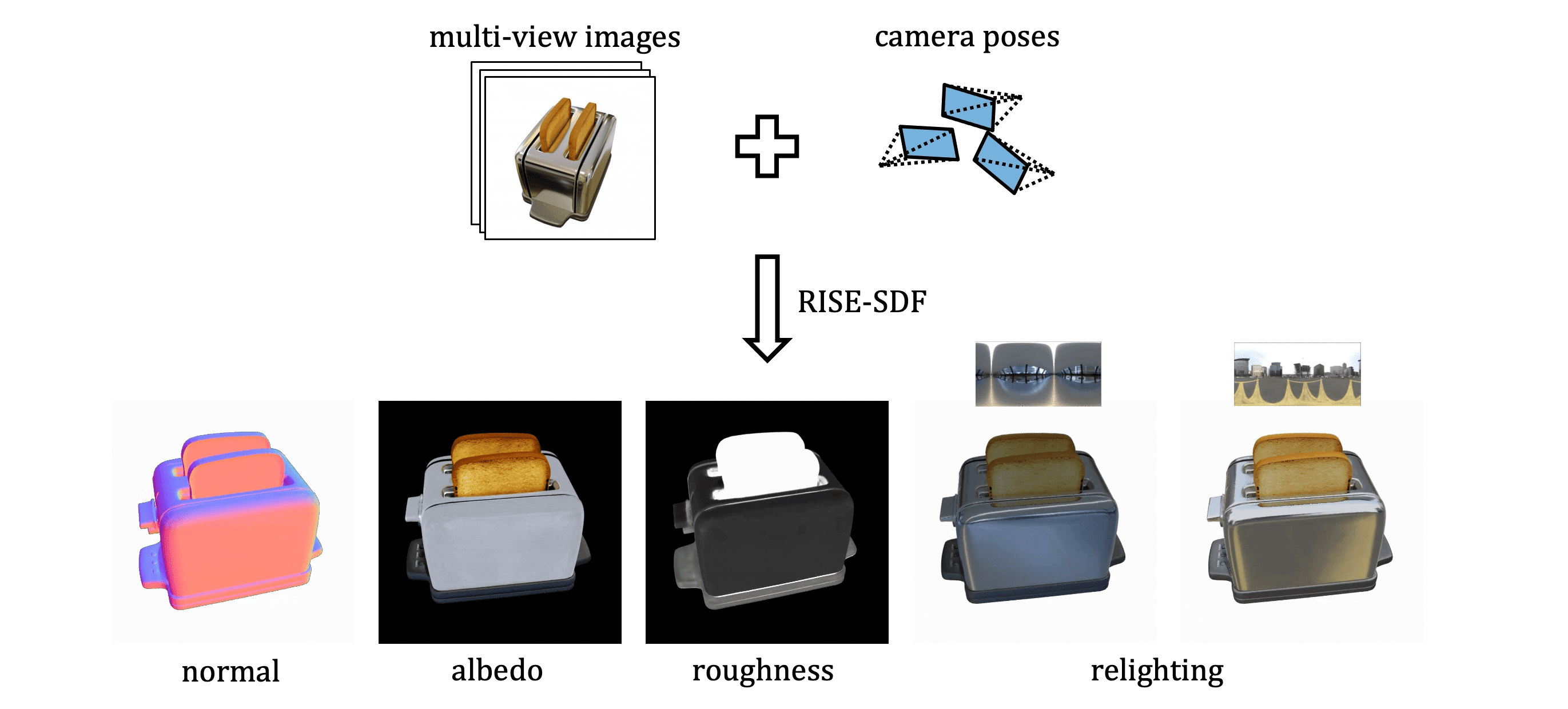 | Deheng Zhang*, Jingyu Wang*, Shaofei Wang, Marko Mihajlovic, Sergey Prokudin, Hendrik P.A. Lensch, Siyu Tang 3DV 2025 Paper | Project website | Dataset In this paper, we propose a novel end-to-end relightable neural inverse rendering system that achieves high-quality reconstruction of geometry and material properties, thus enabling high-quality relighting. The cornerstone of our method is a two-stage approach for learning a better factorization of scene parameters. |
 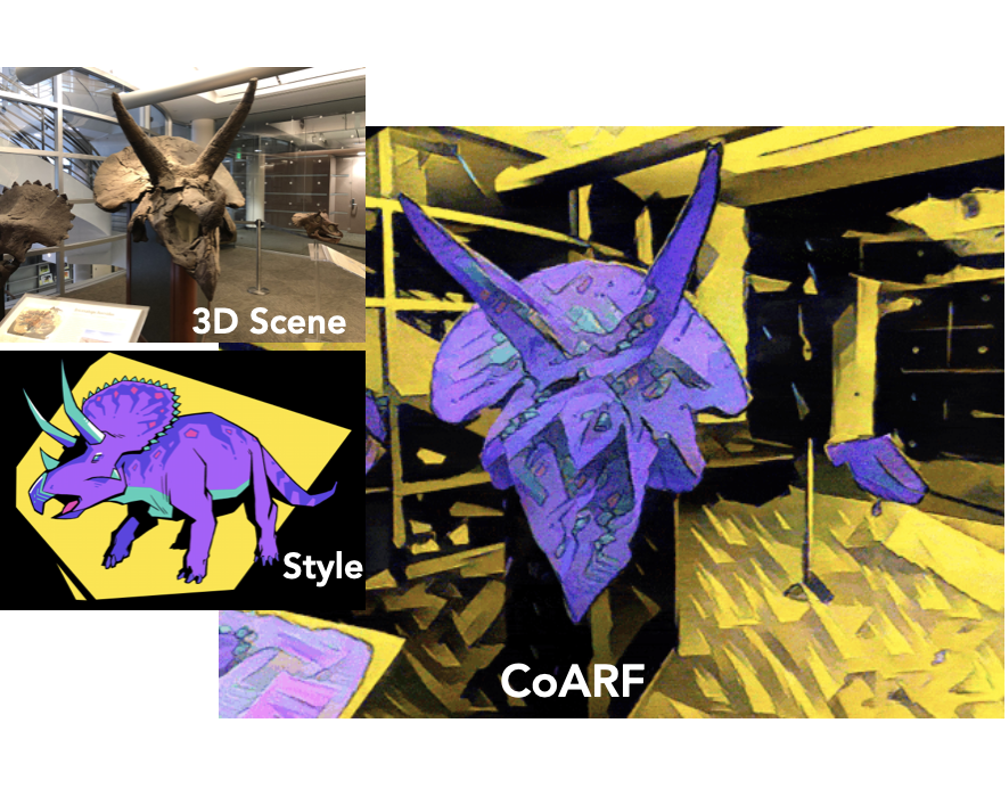 | Deheng Zhang, Clara Fernández Labrador, Christopher Schroers, 3DV 2024 Paper | Project website In this paper, we introduce Controllable Artistic Radiance Fields (CoARF), a novel algorithm for controllable 3D scene stylization. CoARF enables style transfer for specified objects, compositional 3D style transfer and semantic-aware style transfer. We achieve controllability using segmentation masks with different label-dependent loss functions. We also propose a semantic-aware nearest neighbor matching algorithm to improve the style transfer quality. |
Selected Projects
 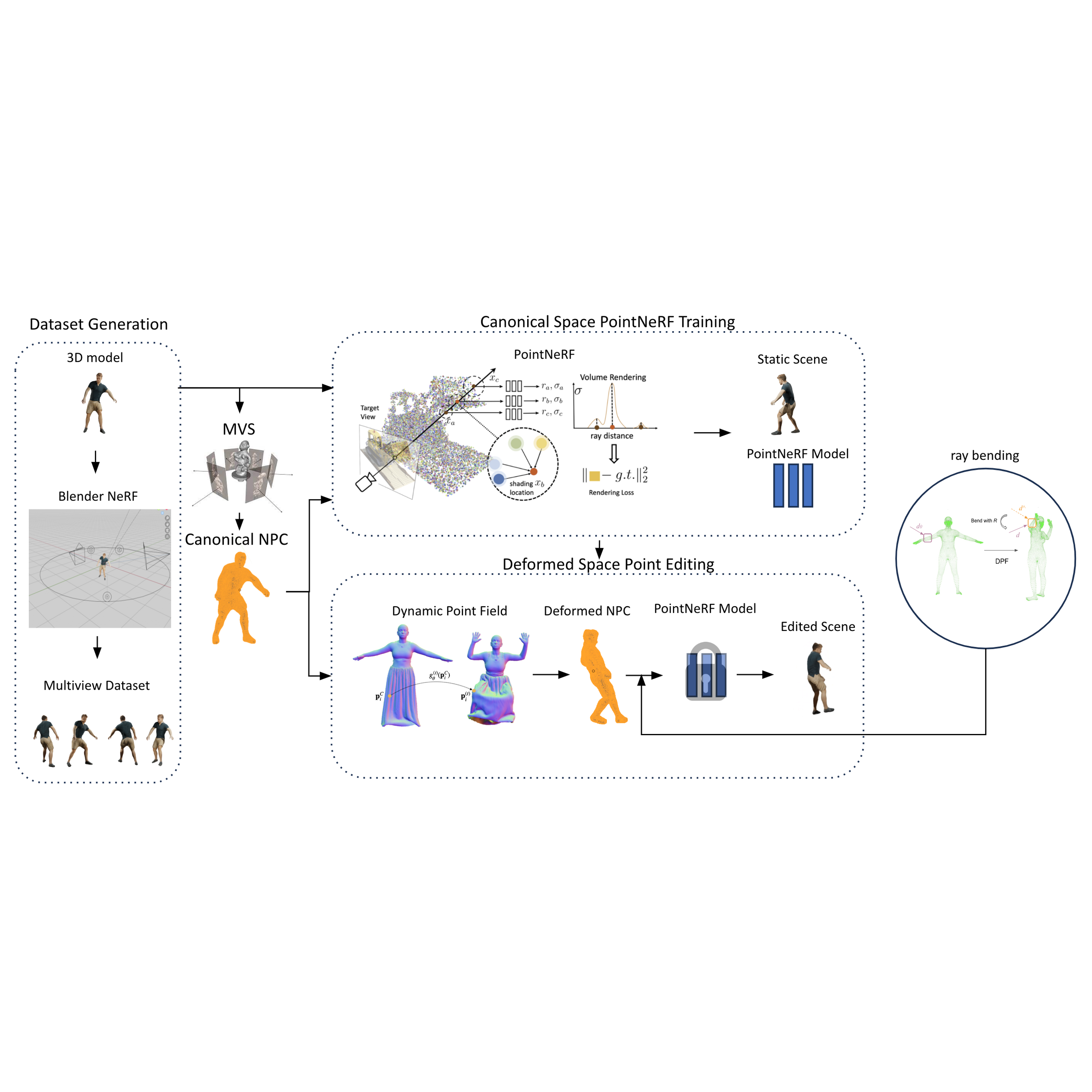 | Deheng Zhang*, Haitao Yu*, Peiyuan Xie*, Tianyi Zhang* (* means equal contribution) Course project of Digital Human in ETH Zürich Paper | Project website | Github Repo In this project, we proposed a new method for learning an animable human avatar model with point-based primitives. Specifically, our method exploits the explicit point cloud to train the static 3D scene based on Point-NeRF and apply the deformation by encoding the point cloud translation using a deformation MLP. We also guarantee rendering consistency by performing rotation-only ray-bending. The final animating avatar is comparable to other state-of-the-art animable human models. |
 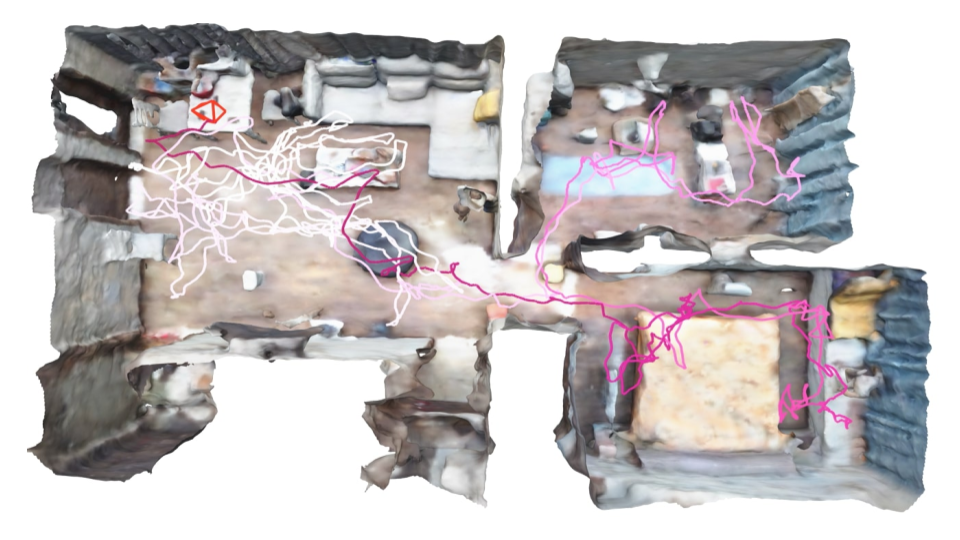 | Deheng Zhang*, Ganlin Zhang*, Feichi Lu*, Anqi Li (* means equal contribution) Course project of 3D Vision 2022 in ETH Zürich Paper | Github Repo  In this project, we present a sparse version of NICE-SLAM, which is a SLAM system incorporating the idea of Voxel Hashing into NICE-SLAM framework. Instead of initializing feature grids in the whole space, voxel features near the surface are adaptively added and optimized. |
 | Deheng Zhang*, Ganlin Zhang*, Longteng Duan*, Guo Han* (* means equal contribution) Course project of Mixed Realiy 2022 in ETH Zürich Paper | Github Repo | Project website In this project, we design, implement and deploy a mixed-reality-based method with HoloLens 2 that enables users to control the Boston Dynamics Spot robot. |
  | Deheng Zhang*, Ganlin Zhang* (* means equal contribution) Course project of Computer Graphics 2022 in ETH Zürich Github Repo | Project website In this project, I implemented part of the Kombu physical-based renderer. The function implemented by me includes volumetric rendering with heterogeneous participating media (ray marching, delta/ratio tracking as the transmittance estimation method), bilateral filter denoising, directional light, and object instancing. Finally, we produced an image about Christmas on the Moon for the rendering competition. |
  | Deheng Zhang Bachelor Thesis in CityU HK Paper | Github Repo In this project, I propose a novel self-attention mechanism with specific mathematical meaning and a novel style transfer mechanism to learn the blank-leaving information in the style image. I also implement the code for training and testing, with a web-based GUI. |
 | Deheng Zhang*, Ganlin Zhang*, Junpeng Gao*, Yu Hong* (* means equal contribution) Course project of Advanced System Lab 2022 in ETH Zürich Paper | Github Repo Focus on speeding up black-box optimization algorithm OPUS from paper Particle Swarm with Radial Basis Function Surrogates for Expensive Black-box Optimization by Rommel G. Regis. Besides, we implement the speed-up C++ version of Bunch-Kaufman Pivoting. |